


随着无人驾驶飞行器(UAV)在搜索救援、洞穴测绘以及建筑制图等领域发挥的作用日益重要,人们对其性能有了更高的期待。但由于无人机高度依赖视觉传感器来感知障碍物并探索环境,当前无人机在感知能力和任务效率上仍受到其传感器视场(FoV)较小的限制。
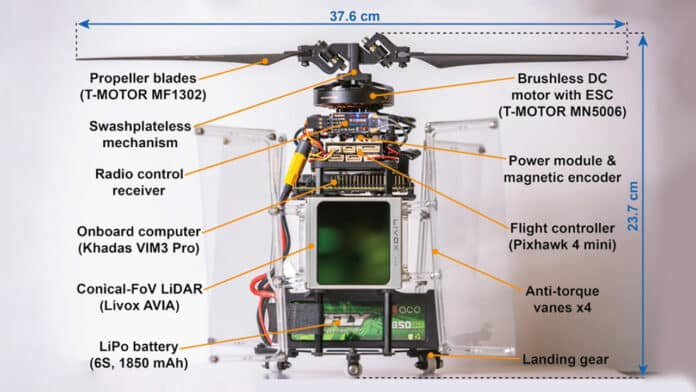
最新消息,来自中国香港大学(HKU)的工程师团队研发出一款名为PULSAR的动力飞行超欠驱动激光雷达传感空中机器人,预计将重新定义无人驾驶飞行器(UAV)的世界格局。这款机器人利用微型计算机和激光雷达传感器,在室内和室外环境中实现了全面的机载感知、测绘、规划和控制能力,全程无需借助任何外部仪器。
PULSAR仅使用一个致动器来为无斜盘机构提供动力并产生推力和力矩。研究团队通过一系列实验,证明了PULSAR能够实时检测静态和动态障碍物、跟踪复杂轨迹,甚至在完全黑暗的环境中依然可以自主导航。其稳健的性能还展示了在抵御外部风干扰方面的优势,使得PULSAR能在不可预知的环境下实现更安全、更稳定的飞行,其悬停位置甚至可以在最大风速4.5米/秒的环境下保持。
据该研究团队介绍,PULSAR相较于具有相同螺旋桨盘面积和航电有效载荷的四旋翼无人机,在保持良好的敏捷性的同时,能耗方面可以节省高达26.7%。
更值得一提的是,由于PULSAR采用了单执行器推进系统,其能量转换损失较小,飞行效率高达6.65g/W。这款无人机的直径仅有37.6厘米,电池容量仅为41瓦时。然而,尽管体积小巧,这款1234克的无人机的悬停时间却超过了12分钟。如果移除激光雷达传感器,并安装更大的螺旋桨和电池,PULSAR的悬停时间还可以延长至40分钟以上。
首席研究员张付博士表示:“我们相信,这将推动无人机在高速旋转下的控制方法,以及在剧烈运动下的同步定位与建图(SLAM)技术的研究。”

 •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
• 